




beta
|
||||||
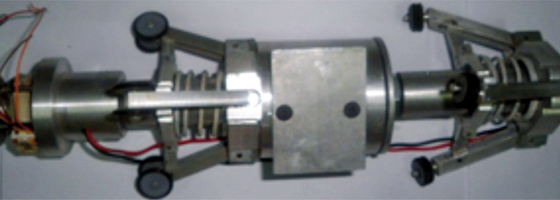 roposed robot based on PVDF sensor
|
Due to corrosive environment, pipes used for transportation often get damaged. Defects caused by corrosion and cracking may cause serious accidents like leakage, fire and blasts. It also reduces the life of the transportation system substantially. The project aims at developing a pipe health monitoring system based on smart sensor based rotating probes which can be transported inside pipes of variable diameters with the help of a conduit crawler robot. Crawler robots are being developed for pipe –health monitoring, but most of them rely on wired signal transmission which causes problems with the movement of the robot inside the pipe. The objective of this work is to establish the usability of a new PVDF based cantilever smart probe as a sensor to sense finite sized discontinuities over a surface using the developed pipe crawler robot. Experiments will be carried out on different patterns, sizes and shapes of surface projections inside the pipe. It is envisaged that this novel sensing system could be used effectively for pipe health monitoring.
|
|||||



