

Union Cabinet has approved a programme titled Global Initiative for Academic Networks (GIAN) in Higher Education..read more...

A team of researchers at Indian Institute of Technology Kanpur has studied experimentally the fluid flow pattern inside the droplet.read more...
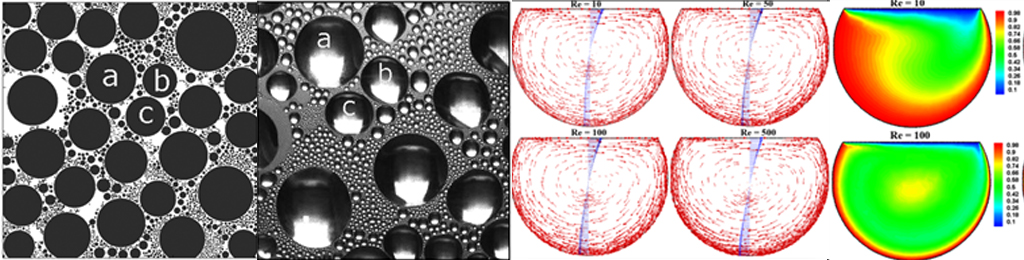

Dropwise condensation is a heterogeneous phase-change process in which vapor condenses in the form of discrete liquid drops.read more...


A team of researchers at Indian Institute of Technology Kanpur have designed and experimentally evaluated a new 8-DOF biped robot.read more...
|
|||||||||||||
|
|||||||||||||
ObjectivesThe main objective of this course is to acquaint students with various tools and techniques to aid in manufacturing planning and control. The course introduces students to topics such as computer aided process planning, concurrent engineering, quality control, forecasting, inventory control, material requirements planning, just in time manufacturing, cellular manufacturing and material flow and storage. Course contentIntroduction to manufacturing systems and CIM; CAPP: CAD; Variant and generative processes; Feature recognition in CAPP; Concurrent Engineering: Concepts of sequential versus concurrent engineering; LCA; QFD; Quality Engineering: Cost of quality; SQC; Introduction to DOE; TQM; PPC: Forecasting; Inventory control; Aggregate planning; Master scheduling; MRP; Sequencing; Lean Manufacturing: Push vs pull system; JIT; Kanban system design; Cellular manufacturing and GT; Automated Material Handling Systems: ASRS design principles; AGV; robots in material handling; Recent trends in manufacturing systems. Total number of lectures: 40Lecturewise breakup1. Introduction to manufacturing systems and CIM: 1-2 Lectures 2. Computer Aided Process Planning: 4-6 Lectures
3. Concurrent Engineering: 2-3 Lectures
4. Quality Engineering: 6-10 Lectures
5. Material Requirement Planning: 6-8 Lectures
6. Lean Manufacturing: 2-3 Lectures
7. Cellular manufacturing and Group technology: 2-3 Lectures 8. Automated Material Handling Systems: 3 Lectures
9. Recent trends in manufacturing systems: 2-3 Lectures Recommended books
Proposing instructors: Dr. V. Kumar, Dr. S. Mishra, Dr. K. Ramani, Dr. U. Roy, Dr. S. Mukhopadhyay, Dr. M. Law, Dr. A. Kumar, Dr. N. Sinha, Dr. S. Bhattacharya |
|||||||||||||
ObjectivesThis is a compulsory course in the fifth semester of the UG programme in Mechanical Engineering. It is intended to give the students an understanding of the basic elements of robotics. With this course, students are expected to develop the knowhow to formulate and computationally solve the typical problems arising in the operation and control of robots. Course contentIntroduction and Overview, Spatial Transformations, Forward and Inverse Position Kinematics, Velocity and Acceleration Kinematics, Robot Dynamics, Actuators and Sensors, Trajectory Planning, Robot Control. Total number of lectures: 27Lecturewise breakup1. Introduction and Overview: 4 Lectures
2. Spatial Transformations: 4 Lectures
3. Forward and Inverse Position Kinematics: 4 Lectures
4. Velocity and Acceleration Kinematics: 4 Lectures
5. Robot Dynamics: 4 Lectures
6. Actuators and Sensors: 2 Lectures
7. Trajectory Planning: 2 Lectures
8. Robot Control: 4 Lectures
Recommended books
Experiments list
Remark: Due to a major overlap, ME UG students are not to be allowed the PG course ME762 as an elective. And, the present course (ME381A) is not to be given to students other than ME UG Proposing instructors: Dr. A. Dutta, Dr. B. Bhattacharya, Dr. K. R. Guruprasad, Dr. K. S. Ramani, Dr. B. Dasgupta |
|||||||||||||