Dropwise condensation on textured surfaces and multi-scale modeling
Dropwise condensation is a heterogeneous phase-change process in which vapor condenses in the form of discrete liquid drops on or underneath a cold substrate.
The heat transfer coefficient of dropwise condensation can be up to an order higher than film condensation and mixed-mode condensation, particularly with low conductivity liquids. Therefore, it is of considerable interest in application such as thermal power plants and condensing equipment. It is also of interest in the material enrichment of large molecular weight liquids. Dropwise condensation is complex process, involving drop formation at the atomic scale, growth of drops by direct condensation, coalescence of drops, drop instability and movement, followed by fresh nucleation. Hence, the dropwise condensation process is hierarchical in the sense that it occurs a wide range of length and timescales. In addition, it depends on the thermo-physical properties of the condensing fluid, physico-chemical and thermal properties of the cold substrate, orientation of the cold substrate, surface texture, degree of sub-cooling, thermodynamic saturation conditions and presence of non-condensable gases. As the driving temperature difference for the process is very small, experimental measurement of heat transfer coefficient in dropwise condensation is a challenging task.
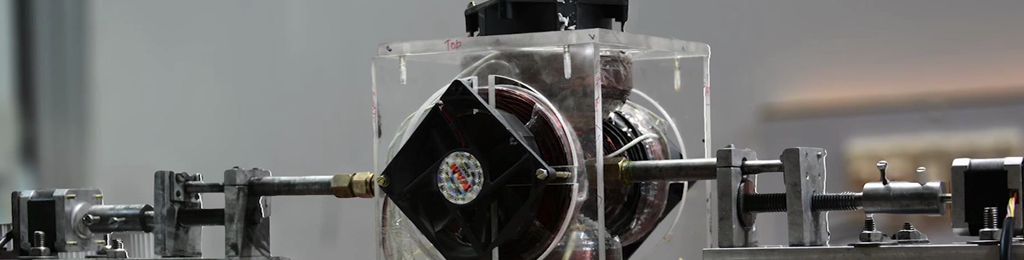
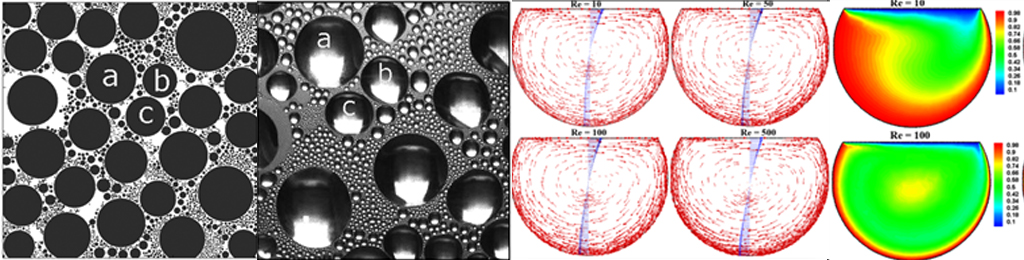
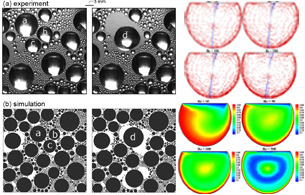
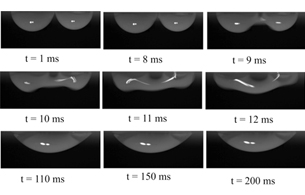
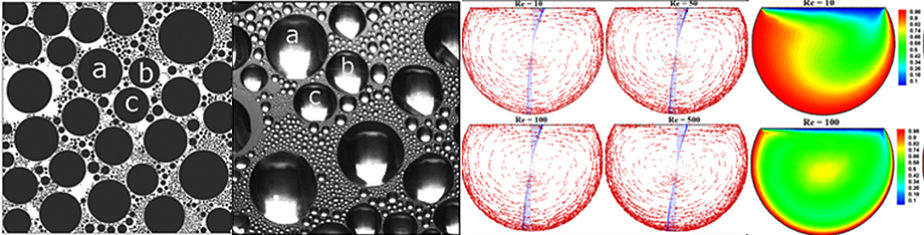
Against this background, a mathematical model of dropwise condensation process underneath an inclined surface is presented in this monograph. The model includes formation of drops at the atomic scale, growth by direct condensation, coalescence, gravitational instability including slide-off and fall-off, followed by fresh nucleation of liquid droplets. The stability criterion is developed as a force balance equation at the level of a drop. Transport parameters of a sliding drop are determined using a CFD model and presented in the form of correlations. Performing the simulation of the complete cycle of dropwise condensation, the spatio-temporal distribution of drops is obtained. Consequently, quantities such as instantaneous condensation pattern, area of coverage, wall friction, and heat transfer rates, as well as important time and area- averaged wall heat fluxes are determined. The simulated condensation patterns are compared against experimentally recorded images. The model is also validated against wall heat fluxes reported in the literature. While applicable for a wide range of fluids such as water and liquid metals, the model is seen to be sensitive to surface texture, inclination, and saturation conditions.
Work is continuing on understanding droplet coalescence on textured surfaces, droplet formation and coalescence of liquid metals and thermo-hydrodynamics of three-phase contact line motion.