International Symposium on Robotics in Industry, Agriculture and Healthcare

ISRIAH 2022
Symposium Details
- Date: 9th & 10th April, 2022
- Mode: Zoom Meeting Link
- Zoom Virtual Background: Download
Symposium Themes
- Agricultural Robots
- Assistive Health Care
- Cognitive Robots
- Condition Monitoring
- Reconnaissance and Surveillance Robots
- Social Robots
- Structural Health monitoring
Inaugural Address
| Prof. Yogesh M. Joshi | Prof. Shigeru Fujimura |
|---|---|
| Dean of International Relations, IIT Kanpur | Dean of Graduate School-IPS, Waseda University |

|

|
Keynote Speakers
Prof. Hiroaki Wagatsuma, Kyushu Institute of Technology, JAPAN

Title: “Brain-inspired Robotics Applied to Cyber-Physical Space Issues”
Abstract: CPS is a statement to focus the importance of the integration between the informatized virtual world “Cyber” and the real world “Physical” that requires physical interactions. Seemingly unrelated phenomena and events in the real world may have hidden complex relationships. Semantics and conceptual treatments in the virtual world will be required as well as brain (mind)-body issues. A local optimization is possible in the conventional information processing systems and automation (robotization); however, trade-off issues, such as environmental issues, where maximizing a benefit is inevitably accompanied with drawbacks in other factors. We are tackling issues of how a global optimization can be achieved from an overall perspective. For the purpose, it is necessary to consider an integration of continuous and discrete (analog and digital) schemes, metadata and semantics, and designing a system to understand the situation. Fundamental theories and implementation methods are developing now to solve those issues.
According to the expectation of the next-generation artificial intelligence to support intelligence inrobotics, we have been devoted to the development of core technologies for the safety assurance in automated driving systems during years of experience. The knowledge-based AI has developed, and it is utilized for intelligent robots to be able to collaborate with humans in a specific task. The achievement of an autonomy of situation- and context-dependent planning is highly important and it can be provided as an integrated AI technology such as the data-driven AI and logic knowledge type AI has been built to overcome the AI black boxing issue, which cannot explain its reason in the decision-making for human experts. By using this architecture, the machine-readable expert knowledge in the site is reconstructed in the form of the hierarchical information for solving the target problem with various constraints such as the environment, tasks, mobility and contraindications of the robots, and it enables to visualize the logical judgment process and provide the effective autonomous procedure. It changes the world in the sense of Society 5.0.
Keywords: description logic, ontology, robot operating system (ROS), RDF/OWL, Semantic Web Rule Language (SWRL)
Biosketch: Hiroaki Wagatsuma started his career as a hardware engineer on development projects of personal computer at the NEC Corporation, for producing the world’s first generation of the notebook-type computer, PC-98note, released in 1989. He received a M.S. in Mathematical Sciences in 1997 and a Dr. Sci. in Mathematical Sciences in 2005 from Tokyo Denki University. In 2000, he became a Special Postdoctoral Researcher at RIKEN for studying computational models focusing on the brain oscillation. From 2003 to 2008, he was a Research Scientist in the Laboratory for Dynamics of Emergent Intelligence at the RIKEN Brain Science Institute. He was a Senior Research Scientist. His research interests include theoretical modeling of brain oscillations, the memory integration process of experienced episodes, and the implementation of oscillatory neural networks into neurorobotics. His research for elucidating emerging process of creative decisions depending on spatial and behavioral contexts in the brain, by using the robotic platform, has received great interest and is supported by grants from the Japanese Ministry of Education, Culture, Sports, Science and Technology. Dr. Wagatsuma is currently Professor at Kyushu Institute of Technology (KYUTECH) in the department of Brain Science and Engineering, Graduate School of Life Science and Systems Engineering.
Prof. Darwin G. Caldwell, Italian Institute of Technology, ITALY

Title: “Robotics for Healthcare, Construction and Agriculture”
Abstract: The Italian Institute of Technology (IIT) was founded in 2006, with the Dept. of Advanced Robotics (ADVR) being one of four founding Departments. Over the next 15 years IIT-ADVR has grew to become one of the largest robotics centres in the world developing key robotic platforms such as the iCub, a child-sized humanoid robot capable of crawling, grasping objects, and interacting with people; COMAN, a controllably compliant humanoid designed to safely interact with people, WALK-MAN, a 1.85m tall, 120kg humanoid that represented the EU in the DARPA Robotics Challenge; the HyQ series (HyQ, HyQ2Max, HyQ-Real) of high performance hydraulic quadrupedal robots; and the Centauro, a human-robot symbiotic system capable of robust locomotion and dexterous manipulation in rough terrains and harsh environments.
Away from legged robotics, developments at ADVR also focused on medical/surgical robot with devices such as the CALM (Computer Aided Laser Microsurgery) system, the Cathbot and SVEI (for catherization and tissue type detection) and the Arbot (Ankle rehabilitation robot) that is now successfully commercialised by Movendo Technology. There was also pioneering work on exoskeletons such as the XoTrunk, XoShoulder, XoElbow and the XoSoft Exosuit, while industrially ADVR has worked on many manufacturing tasks, but also was central in the deployment of inspection and maintenance robots on the recently opened San Giorgio Bridge in Genoa.
In this presentation I shall very briefly try to cover some of the key developments at IIT in robotics for healthcare, construction, agriculture.
Biosketch: Darwin G Caldwell is Founding Director of the Italian Institute of Technology (IIT) in Genoa, Italy, and Director of the Dept. of Advanced Robotics (ADVR) at IIT. Prof. Caldwell was a pioneer in the development of core technologies in compliant and variable impedance actuation, Soft and Human Friendly Robotics and the creation of ‘softer’, safer robots, that draw on developments in materials, mechanisms, sensing, actuation and software. These developments have been fundamental to advances in humanoids, quadrupedal robots and medical robotics. Key robots developed by his team include: iCub, a child-sized humanoid robot capable of crawling, grasping objects, and interacting with people; COMAN, a controllably compliant humanoid designed to safely interact with people and have more natural (loco)motion. WALK-MAN, a 1.85m tall, 120kg humanoid that competed in the DARPA Robotics Challenge; the HyQ series (HyQ, HyQ2Max, HyQ-Real) of high performance (speed, agility, power) hydraulic quadrupedal robots; and the PHOLUS/Centauro, a human-robot symbiotic system capable of robust locomotion and dexterous manipulation in rough terrain and harsh environments. Prof. Caldwell is or has been an Honorary professor at the Universities of Manchester, Sheffield, Bangor and King’s College London in the UK, and Tianjin University in China. He has published over 700 papers, has over 20 patents and has received over 50 awards/nominations at international conferences and events. In 2015, he was elected a Fellow of the Royal Academy of Engineering for “his outstanding contribution to robotic systems, their mechanisms, electronics and control”. In 2022 he was elected a Fellow of the IEEE “for contributions to Actuator Technology, Legged Systems and Soft Human Friendly Robotics”.
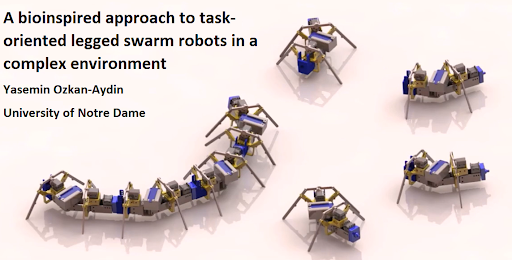
Prof. Yasemin Ozkan-Aydin, University of Notre Dame, USA

Title: “A bioinspired approach to task-oriented legged swarm robots in a complex environment”
Abstract: Legged robots can achieve high performance in uneven or complex environments; however, as the complexity of the environment increases the robot’s performance can suffer due to deleterious interactions like jamming of limbs with environmental heterogeneities. In such situations, increasing the number of legs can be a solution to increase the adaptability, robustness, and maneuverability of the system as well as stability. In this talk, I will introduce a swarm robotic system where low-cost, modular four-legged robots join together to create a functional, resilient multi-legged robot that is capable of performing challenging real-world tasks such as climbing hills, overcoming obstacles, and moving on rough terrain by maintaining stability, which is almost impossible for individuals to do alone. Further, will explain how the variation in body/limb forms of individuals affect the mechanics and performance of swarm locomotion.
Biosketch: Dr. Yasemin Ozkan-Aydin is an Assistant Professor at the College of Engineering in the University of Notre Dame. She completed her Ph.D in Electrical and Electronics Engineering from the Middle East Technical University, Turkey in 2014. She was a Postdoctoral Fellow at Georgia Tech from 2016 to 2021. Her research lies at the intersection of robotics, biology, and computer science - specifically, soft robotics, bio-inspired design, and swarm robotics. She focuses on understanding the factors that play a key role in animals’ locomotion and developing predictable, precise, and robust robotic systems that can move across unpredictable, complex terrains as skillfully as biological organisms.
Prof. Yusuke Maeda, Yokohama National University, JAPAN

Title: “Challenges for accelerating automation with home, industrial and field robotics "
Abstract: Automation is critically important to realize a safe, efficient, and comfortable society. This talk will describe our ongoing projects to support human domestic life, production in factories, and mining by robotic automation. The topics are: home robotics including dishwashing and origami folding, industrial robotics including robot calibration and part feeding, and field robotics including traffic control of dump trucks in mines.
Biosketch: Prof. Yusuke Maeda is a Professor in the Division of Systems Research, Faculty of Engineering at Yokohama National University. His research interests include Robotic Manipulation, Robot teaching, and Decentralized Manufacturing Systems. Prof. Maeda became a Fellow of Robotics Society of Japan in 2019. Some of his various honors and accolades include:
- Finalist, Best Manipulation Paper Award, IEEE International Conference on Robotics and Automation 2013 (ICRA 2013), IEEE Robotics and Automation Society, 2013.
- Funai Gakujutsu Sho (Academic Award), Funai Foundation for Information Technology, 2012.
- Manufacturing Systems Technological Achievement Award, Manufacturing Systems Division, The Japan Society of Mechanical Engineers, 2010.
- 2007 Original Paper Award, FANUC FA & Robot Foundation, 2008.
- Funai Joho Kagaku Shorei Sho (Information Technology Young Investigator Award), Funai Foundation for Information Technology, 2005.
- Young Investigator Excellence Award, The Robotics Society of Japan, 2004.
He is a member of the following professional societies:
- IEEE Robotics and Automation Society (IEEE-RAS)
- The Robotics Society of Japan (RSJ)
- The Japan Society for Precision Engineering (JSPE)
- The Japan Society of Mechanical Engineers (JSME)
- The Society of Instrument and Control Engineers (SICE)
Prof. Rajesh Elara Mohan, Singapore University of Technology and Design, SINGAPORE

Title: “The Rise of Self-reconfigurable Maintenance Robots”
Abstract: Self-reconfigurable robots are intelligent machines capable of autonomously changing their kinematic morphologies to overcome complexities in the traversing environment or task being handled. Their promise of a high degree of versatility, robustness, and modularity is set to open up a wide range of new applications for robots. However, developing these robots are highly challenging. While some progress has been achieved, there are still many open issues. In this talk, I will share our ongoing efforts at the Singapore University of Technology and Design towards the design, development and deployment of self-reconfigurable robots using a well-defined set of deployment use cases in the maintenance domain. I will also provide an insight into our concerted efforts being a catalyst to inspire an ecosystem of Singapore based robotic startups in non-conflicting and niche domains.
Biosketch: Dr. Mohan is currently an Assistant Professor with the Engineering Product Development Pillar at Singapore University of Technology and Design (SUTD). He received his Ph.D. and M.Sc degrees from the Nanyang Technological University in 2012 and 2005. He obtained his B.E degree from the Amrita Institute of Technology and Sciences, Bharathiar University, India. His research interests are in robotics with an emphasis on self-reconfigurable platforms as well as research problems related to robot ergonomics and autonomous systems. He has published more than 80 papers in leading journals, books, and conferences. He is the recipient of SG Mark Design Award in 2016, 2017 and 2018, ASEE Best of Design in Engineering Award in 2012, Tan Kah Kee Young Inventors’ Award in 2010 and A’ Design award in 2018. He is the co-founder of Lionsbot, a robotics company that develops and deploys a wide range of autonomous cleaning robots. He is also a visiting faculty member of the International Design Institute at Zhejiang University, China.
Prof. Fabio P. Bonsignorio, CEO, HeronRobots, ITALY

Title: “Towards Industry 4.0, Precision Agriculture.. and beyond”
Abstract: The significant progress we witness in sensors, actuators, materials, Internet of Things, perception and many other areas of Robotics and AI enable a radical redesign of production and distribution processes, in any economic sector, from Industry to Agriculture and Logistics. The more mature changes affecting industry are referred to as ‘Digitization of the European Industry’ at European level and ‘Industry 4.0’ in Italy and Germany. The same technologies can be applied to Agriculture leading to the concept of Precision Agriculture or ‘Agriculture 4.0’. A quite positive side effect of the recent advances is that the Circular Economy paradigm becomes economically sustainable allowing to cope with quite serious sustainability issues we are facing.
We will describe and discuss the technological and practical issues and opportunities of the ongoing research and applications for Industry 4.0, Precision Agriculture and the Circular Economy and will explore and make some conjectures on what will come next. We will discuss how and why the issues related to the reproducibility of research results and methods for the objective evaluation of intelligent robots performances are of critical importance in the current context.
The aim of this talk is to give a deep and hands-on understanding of the opportunities and challenges related to the radical transformation of product and service ecology made possible by the recent technological advancements in IOT, Machine and Deep Learning, Computer Vision and Object Recognition.
Biosketch: Fabio Bonsignorio is founder and CEO of Heron Robots. He has been until 2019, a visiting professor at the Scuola Superiore Sant’Anna, Pisa, Italy. He was also a professor at the Carlos III University of Madrid, where he was awarded the Santander Chair of Excellence in Robotics in 2009.
He has been working in the R&D departments of several major Italian and American companies, mainly in the applications of intelligent systems and technology transfer with coordination/management responsibilities for some 20 years. He is author or co-author of more than 150 publications in the areas of robotics, cognition and manufacturing systems in the last three years, since he became an almost full time researcher. His first paper on robot control dates back to 1985.
Special Invited Talks
Dr. Anirban Chowdhury, University of Essex, United Kingdom
Title: “Affordable Brain-robot interface guided home-based telerehabilitation (BRIGHT)”
Abstract: Telerehabilitation is an important concept in today’s world where stroke is the leading cause of disability worldwide. Especially, in rural areas of low and middle-income countries where access to healthcare facilities is severely scarce, people affected by neurological diseases have no means to get quality rehabilitation therapy. This prevents them from getting back to a normal life, more importantly losing daily livelihood and incurring huge financial burden for their families. A major drawback of the current stroke care system is that as soon as the patients are shifted to home after initial care from the hospital they are deprived of getting adequate therapy required for getting back their motor functionalities. This is because of the huge cost associated with daily therapeutic sessions by an expert therapist and also the lack of availability of an expert therapist. BRIGHT aims at developing a low-cost but highly advanced telerehabilitation facility incorporating the modern concepts of brain-robot interface-based robotic systems and artificial intelligence. This will provide the patients with the best treatment sitting at their homes while still connected to their clinicians and physiotherapists at the hospital with a remote link. Thus the patients will get a continuum of treatment from the occurrence of the injury to full recovery without any break due to shifting from the hospital facility to home. BRIGHT can also be advantageous for the hospitals as they can discharge the patients early while the hospital physiotherapists can be connected virtually to multiple patients at the same time in their home settings.
Dr. Rekha Raja, Wageningen University, Netherlands
Title: “Learning manipulation and grasping AgroFood”
Abstract: One food processing phase where current levels of automation do not suffice is the task of bin picking and placing agro-food products in cluttered scene for packaging or further processing tasks. This task is deceptively hard not only because of product variations but overlapping objects make it difficult for a robot to identify the best method for picking up. To handle these complexities, skilled robotic manipulation is necessary. Skilled manipulation uses both non-prehensile (pushing) and prehensile (grasping) actions: pushing can rearrange clutter to create space for fingers while grasping can displace objects making pushing more precise. In this talk, I will demonstrate if a robotic agent can learn this partially skilled manipulation using deep reinforcement learning for the purpose of picking up agro-food products in cluttered environments.
Mr. Bardienus Pieter Duisterhof, Carnegie Mellon University, USA
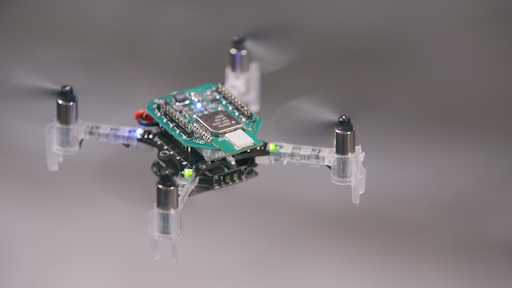
Title: “Insect-inspired AI for gas source localization using a swarm of nano drones”
Abstract: Nano quadcopters are ideal for gas source localization (GSL) as they are safe, agile and inexpensive. However, their extremely restricted sensors and computational resources make GSL a daunting challenge. In this work, we propose a novel bug algorithm named ‘Sniffy Bug’, which allows a fully autonomous swarm of gas-seeking nano quadcopters to localize a gas source in an unknown, cluttered and GPS-denied environment. The computationally efficient, mapless algorithm foresees the avoidance of obstacles and other swarm members, while pursuing desired waypoints. The waypoints are first set for exploration, and, when a single swarm member has sensed the gas, by a particle swarm optimization-based procedure. We evolve all the parameters of the bug (and PSO) algorithm, using our novel simulation pipeline, ‘AutoGDM’. It builds on and expands open source tools in order to enable fully automated end-to-end environment generation and gas dispersion modeling, allowing for learning in simulation. Flight tests show that Sniffy Bug with evolved parameters outperforms manually selected parameters in cluttered, realworld environments. Videos: https://bit.ly/37MmtdL
Prof. Nilanjan Chattaraj, National Institute of Technology, Durgapur, India
Title: “The assistive Robosapiens with human-like emotions - its fundamental and technological challenges”
Abstract: Assistive robotics has achieved magnificent attention over the time in healthcare support. Considering its essence, those are designed to execute some tasks, but not to execute those tasks displaying human-like emotion, which has a catalytic impact in healing/support system. Is that indeed possible to develop human-like assistive robot exhibiting human-like emotions in healthcare support? Can the evolution of Robosapiens be a potential alternative to human healthcare support?
Conveners
- Prof. Bishakh Bhattacharya, IIT Kanpur, India
- Prof. Harutoshi Ogai, IPS-Waseda University, Japan
Registration Details
- Registration FREE
- For Attendees: Fill the following Google Form (Attendees)
For any queries, please contact event co-ordinators:
- Anirudha Bhattacharjee (anirub@iitk.ac.in)
- Nayan Jyoti Baishya (nayanb@fuji.waseda.jp)
Please keep visiting the website for regular updates.
Image Gallery

