Research Success Story
A multi-institute consortium of several universities from India and the UK, co-funded by Department of Science and Technology (DST) and Research Council of the UK (RCUK), for the project titled "Advancing the Efficiency and Production Potential of Excitonic Solar Cells (APEX)" has been awarded the Newton Prize worth £200,000 at an event on 1st November 2017 in New Delhi, presented by Minister for Universities, Science and Research Jo Johnson and Sir Venki Ramakrishnan, Chair of the Newton Prize Committee and President of the Royal Society.The project was conducted under the flagship of India-UK consortium project APEX-II (Advancing the Efficiency of Excitonic Solar Cells). The project has focused on developing advanced materials and process technologies to create cleaner, more sustainable and affordable energy with aim to improve the quality of life in various parts of the world including villages in developing countries. In addition to several publications and patents, the project has led to strong partnerships between academic groups of various institutes of India and UK as well as Industries. The consortium was coordinated by Prof. Hari Upadhyaya of Brunel University and Dr. Suresh Chand of NPL Delhi (Phase-I) and Prof. Viresh Dutta of IIT Delhi (Phase-II). IIT Kanpur has been the partner of this consortium since its inception in 2010 with Professor Ashish Garg, Department of Materials Science and Engineering being the Principal Investigator. The other participating institutes from India are IIT Delhi, IISc Bangalore, CSIR-NPL New Delhi, CSIR-NCL/IISER Pune, JNCASR Bangalore, and CSIR-IICT Hyderabad while UK partnering institutions are Imperial College London, Cambridge University, University of Oxford, Swansea University, Edinburgh University and several industrial partners from both India and UK. The project has also resulted in the award of SUNRISE project which has been funded as part of the GCRF grow call by the UK Government and is scheduled on start in early 2018.
more details: https://www.epsrc.ac.uk/newsevents/news/newtonprizeindia/.

more details: https://www.epsrc.ac.uk/newsevents/news/newtonprizeindia/.
The Government of Malawi and UNICEF has launched an air corridor for potential humanitarian use of unmanned aerial vehicles (UAVs), commonly known as drones. This is the first of its kind in Africa and unique in the world for the application of drone with a focus on humanitarian and developmental purpose. The joint application of IIT Kanpur with EndureAir (sponsor and partner of IITK team for this activity) is approved by the Malwai CAA for first humanitarian drone testing activity involving medicine delivery at Malawi as part of UNICEF drone corridor. This is a great opportunity for IIT Kanpur and Endure Air to collaborate and compete on a global platform.
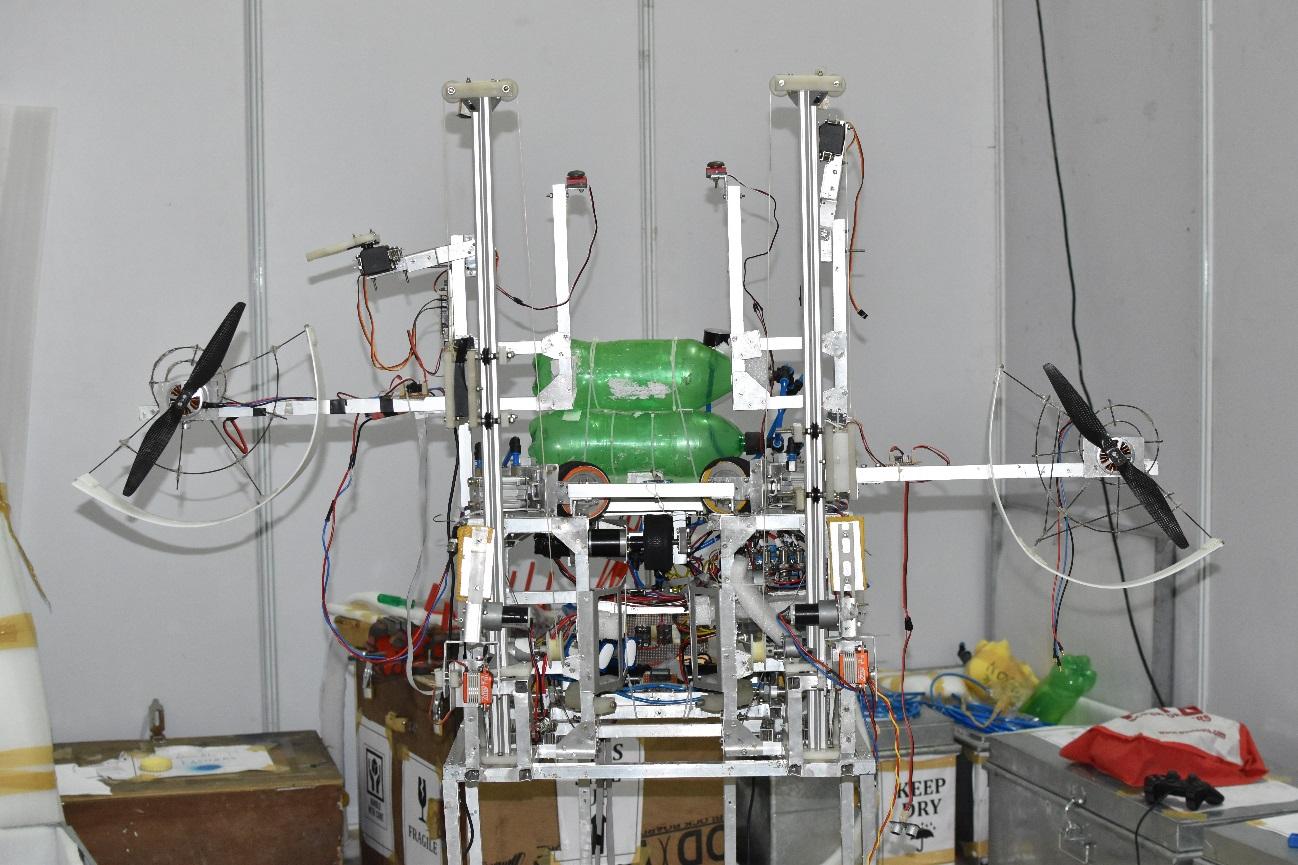
The solution based on Autonomous Helicopter has been developed by the students of Aerospace Engineering Department: Mr. Nidhish Raj (PhD), Mr. Sagar Setu (PhD), Mr. Ankur Duhoon (Research Engineer, IITK alumni) and Mr. Joydeep Bhowmik (PhD) under the guidance of Prof. Abhishek and Prof. Mangal Kothari, Department of Aerospace Engineering. The current Rotary Wing Unmanned Air Vehicle (RUAV) developed at IIT Kanpur is capable of lifting 3 kg of useful payload and fly for over 2 hours. The best range speed of the RUAV is 75 km/hr and the top speed can easily reach 120 km/hr. The UAV uses regular petrol as its fuel, which enables it to achieve better performance than battery powered drones. The autopilot which is "brains" of the RUAV for fully autonomous operations has been fully developed by the students. The trial in Malawi would allow to test the capabilities of the existing platform. The feedback received would allow us to enhance the design further. This solution would facilitate delivery of critical supplies to remote areas which are not easily accessible by other means. IIT Kanpur team would be heading to Malawi for trials and demonstration in February next year.
Video Demonstration of Package Delivery System Developed at IIT Kanpur

The solution based on Autonomous Helicopter has been developed by the students of Aerospace Engineering Department: Mr. Nidhish Raj (PhD), Mr. Sagar Setu (PhD), Mr. Ankur Duhoon (Research Engineer, IITK alumni) and Mr. Joydeep Bhowmik (PhD) under the guidance of Prof. Abhishek and Prof. Mangal Kothari, Department of Aerospace Engineering. The current Rotary Wing Unmanned Air Vehicle (RUAV) developed at IIT Kanpur is capable of lifting 3 kg of useful payload and fly for over 2 hours. The best range speed of the RUAV is 75 km/hr and the top speed can easily reach 120 km/hr. The UAV uses regular petrol as its fuel, which enables it to achieve better performance than battery powered drones. The autopilot which is "brains" of the RUAV for fully autonomous operations has been fully developed by the students. The trial in Malawi would allow to test the capabilities of the existing platform. The feedback received would allow us to enhance the design further. This solution would facilitate delivery of critical supplies to remote areas which are not easily accessible by other means. IIT Kanpur team would be heading to Malawi for trials and demonstration in February next year.
Video Demonstration of Package Delivery System Developed at IIT Kanpur
Atechnical leader, PhD), Ramdas (PhD), Diksha Aggarwal (MTech), Sakshi Gupta (MTech), Avinash Shet (MTech), Vishesh Kumar Singh (MTech), and Naba Kishore Routray (MTech) under the guidance of Prof. Abhishek and Prof. C. Venkateshan have successfully carried out the conceptual design of an 'unmanned helicopter' named "Vibhram". This design effort was carried out as course project for AE 660: Preliminary Design of Helicopter course in Aerospace Department. The team won third prize in the graduate category of 34th Annual Student Design Competition organized by the American Helicopter Society (AHS). This is the first time in 34 years history of this competition that a team from Asia has finished on the podium of this competition in the graduate category. The objective of this year's competition was to carry out system level design of an unmanned helicopter that can fly continuously for 24 hours while carrying a payload of 80 kg.
This activity resulted in a highly innovative novel dissimilar coaxial rotor concept (patent filed) which has been predicted to be more efficient than any existing helicopter configuration such as conventional (single main rotor and tail rotor) and regular coaxial helicopter by 15-30%. This revolutionary new design is expected to have a strong impact on the future of helicopter technology enabling them to hover with significantly improved efficiency

This activity resulted in a highly innovative novel dissimilar coaxial rotor concept (patent filed) which has been predicted to be more efficient than any existing helicopter configuration such as conventional (single main rotor and tail rotor) and regular coaxial helicopter by 15-30%. This revolutionary new design is expected to have a strong impact on the future of helicopter technology enabling them to hover with significantly improved efficiency
Just like self-driving car has become a reality, autonomous robots will soon receive your order at Amazon and will post your goods with better efficiency. At the heart of this autonomous ware-housing lie the contributions of machine learning and artificial intelligence. Thus robots can replace humans in performing cognitive tasks. At this backdrop, Amazon has been organizing a global competition – Amazon Robotics Challenge - since 2015.
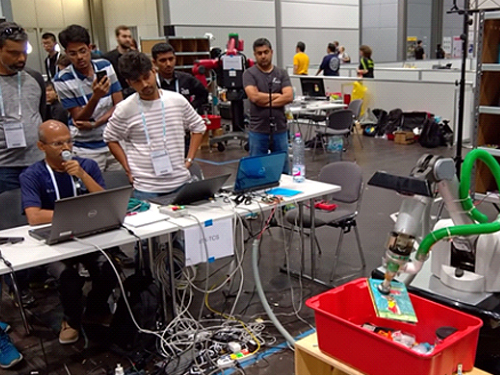
This year the competition was held in Nagoya, Japan during 27-30 July 2017. IIT Kanpur and TCS jointly put up a team that was selected in the final event under the tag-name IITK-TCS. Sixteen international teams from various universities across the world including MIT- Princeton, University of Bonn, Duke University, Carnegie Mellon University and Nanyang Technological University have participated in this event. The competition had three events: Stowing, Picking and stowing-cum-picking. A customized robotic system was required to perform these tasks autonomously. The Challenge combined object recognition, pose recognition, grasp planning, compliant manipulation, motion planning, task planning, task execution, and error detection and recovery. This time IITK-TCS team had excellent performance in all three parts of the competition. In stowing IITK-TCS team robot secured 5th position while in picking, the team robot secured 3rd position. By virtue of their good performance in both stowing and picking, the team qualified for the final event of stowing cum picking event where the robot scored 170 points and the team secured 4th position. The team was led by Prof Laxmidhar Behera from the Department of Electrical Engineering. Other team members are Prof KS Venkatesh, Anima, Samrat, Ashish, Ravi Prakash, Mohit, Siddharth and Abhay.
This year the competition was held in Nagoya, Japan during 27-30 July 2017. IIT Kanpur and TCS jointly put up a team that was selected in the final event under the tag-name IITK-TCS. Sixteen international teams from various universities across the world including MIT- Princeton, University of Bonn, Duke University, Carnegie Mellon University and Nanyang Technological University have participated in this event. The competition had three events: Stowing, Picking and stowing-cum-picking. A customized robotic system was required to perform these tasks autonomously. The Challenge combined object recognition, pose recognition, grasp planning, compliant manipulation, motion planning, task planning, task execution, and error detection and recovery. This time IITK-TCS team had excellent performance in all three parts of the competition. In stowing IITK-TCS team robot secured 5th position while in picking, the team robot secured 3rd position. By virtue of their good performance in both stowing and picking, the team qualified for the final event of stowing cum picking event where the robot scored 170 points and the team secured 4th position. The team was led by Prof Laxmidhar Behera from the Department of Electrical Engineering. Other team members are Prof KS Venkatesh, Anima, Samrat, Ashish, Ravi Prakash, Mohit, Siddharth and Abhay.
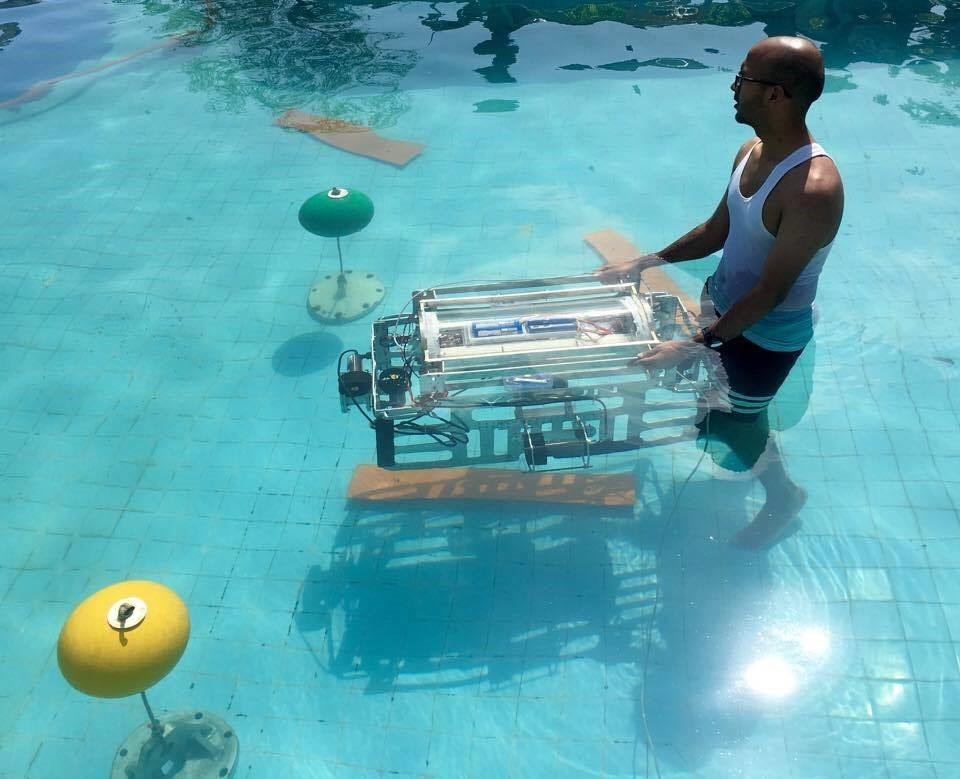
IIT Kanpur AUV Team, for their robot named Varun, won the second position in their debut at the 5 National Student Autonomous Vehicle (SAVe) organized by the National Institute of Technology (NIOT), under the Ministry of Earth Science at Chennai, India. The competition aims to provide a platform for students to explore the underwater technologies and kindle their interest in marine research. The team behind the design and development of Varun consists of a group of 15 undergraduates from a variety of majors including Mathematics, Physics, Aerospace, Electrical, Chemical and Computer Sciences. The work divided into three subsystems namely Mechanical, Electrical and Software development. Varun, with its five degrees of freedom, has a depth of operation of 50 meters and can run up to two hours continuously. Its sensor suite comprising of dead-reckoning sensors namely inertial measurement unit and depth sensor along with the front and bottom facing cameras provide Varun the ability to navigate underwater seamlessly and perform a variety of tasks such as follow lines underwater, detect buoys and gates, and drop markers when required. During the event held in December, the experts present were impressed by the neat design and functionality of Varun. The competitors at the event were from institutes all over the nation. Nevertheless, Varun had an edge, thanks to the careful planning and implementation done by the team over the span of two years. The team promises to bring more surprises in the future and a better vehicle for next competition.
A team of IIT Kanpur students participated in ROBOCON 2016. The team stood second runner up among 105 teams from all over the country. ABU ROBOCON is an Asia Pacific Inter Colligate Robotics competition which aims at providing a platform to robotics enthusiasts and help drive advancements in robotics technology. IIT Kanpur has been participating in the event since its inception. Advances in eco-friendly technology is the need of the hour. Keeping that in mind the problem statement of ROBOCON 2016 dealt with this theme of 'clean energy recharging the world'. This year the objective was to develop two semi-autonomous Robots, with one (Hybrid bot) providing non-contact driving energy to propagate the other (Ecobot) on a path containing Slopes and Hills, River, and Down Hill, then exchange a wind propeller to climb up a Wind Turbine Pole (about 2m) in order to assemble Wind Turbine in automated mode. Wind energy was used as the non-contact energy source by the team. The Ecobot was fabricated using light weight balsa wood and implemented Image processing to steer along the course. Other techniques like wall following (using ultrasonic sensors), line following (using line sensors), pneumatic pressure actuation (for the pole climbing) and PCB Designing were also used in its functioning. The team successfully executed the full problem statement.