
When we think of a robot the image that springs to mind is that of a multi limbed machine that performs a variety of tasks with human dexterity and superhuman efficiency. The project Transformer was motivated by this image.
Transformer is a project completed in summer camp ’14 under robotics club IIT Kanpur. The project has been undertaken by four BTech students of Y13. The team members are Ayush Poddar, Harshit Lathi, Anirban Manna and Yugesh Kuma.
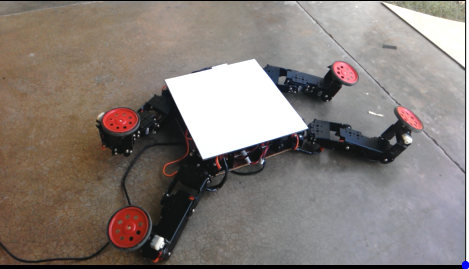
The main objective of this project was to make a robot which performs multitasking like overcoming a passage, climbing stairs, ascending sloped surfaces and also challenging rough surfaces. It is a kind of all – terrain robot meant to detect surfaces and switching its mode to accustom to that particular type of terrain.

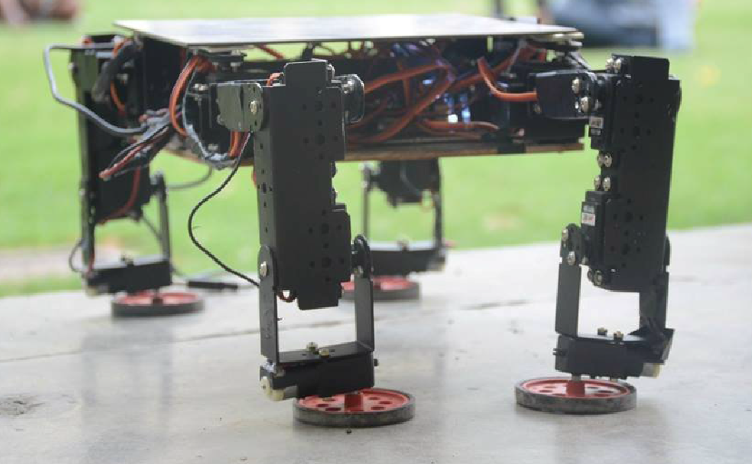
The robot is four limbed, each leg is an assembly of four servo motors connected through brackets. It is fixed to the chassis on one end and has a wheel mounted on a dc motor on the other end.
A servomotor is a rotary actuator that allows for precise control of angular position, velocity and acceleration. It consists of a suitable motor coupled to a sensor for position feedback. Its angle can be set as desired and can be controlled through a microcontroller.
Arduino mega has been encorporated as the 3.3.microcontroller in this project.
Arduino is an open-source electronics prototyping platform based on flexible, easy-to-use hardware and software. The software consists of a standard programming language compiler and the boot loader that runs on the board.The microcontroller on the board is programmed using the Arduino programming language

A 7.4 V, 3300 mAh Li-Po battery is used to power the robot, voltage regulators were used to supply a constant voltage of 6v to the servo motors (the voltage required for their proper functioning) against the 7.4v provided by the battery.The voltage regulator used here is 7806,which comes under a family of 78XX type of voltage regulators.


The four motors attached to the last servo of each legs are driven by motor drivers. Its main function is to amplify the current given by arduino to the rated current of the motors.The current which can be drawn out from the arduino is very small (order of milli – amps) hence there exists a need to amplify the currents upto the order of 1 amps for the motors to work properly. Motor driver is comprised of ICs. They also protect the circuit against short – circuiting and overheating.

All the above mentioned circuit elements are mounted on a GPB () which is to the chassis.the chassis is made of wooden ply coated with glass fiber.
The robot is programmed using the Arduino software and then controlled by a serial monitor (putty is used in this project) and the serial communication is done through a Bluetooth module which is a part of the circuit.
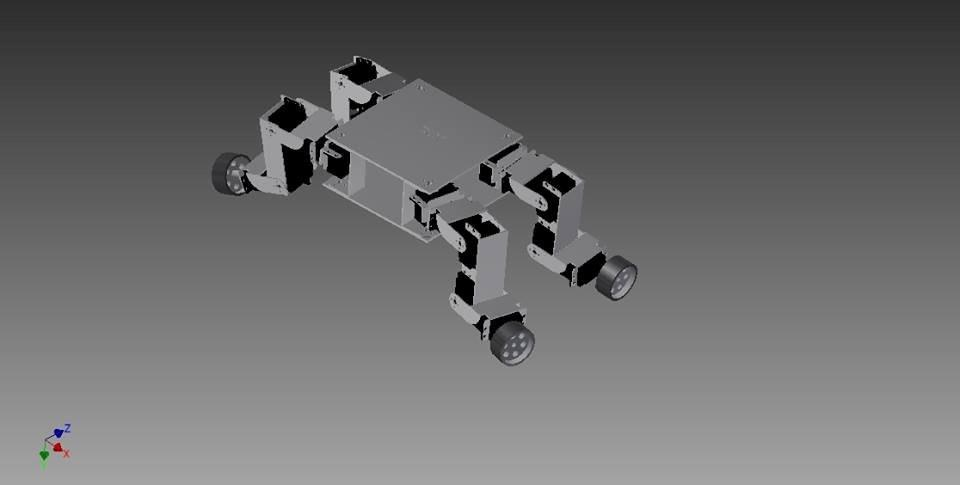
Before starting the assembly of the components a design is made with the help of auto-desk inventor and the circuit diagram is planned
WORKING
Command is given from laptop through a serial monitor to the robot there are commands to control individual components (servos,motors) as well as to perform a group of tasks such as reducing the level of the robot,crawling as a whole without controlling individual components.

When encountering a passage a command is given which performs specific movements and reduces its height.Next command drives all the motors forward hence crossing the passage.
When a slope is encountered the robot again reduces its height and moves forward towards the slope and ascends it. Ascending slopes upto an angle of 45degree has been achieved (the slope angle may vary depending on motor`s torque and rpm).When it reaches the topmost part of the slope it rises a little to cross the edged part.
When it reaches the stairs the front two legs are raised and laid support against the stair wall.now the motors of front legs are driven and a thrust is provided by rear legs by raising it the two actions are performed simultaneously. The front motors are driven till the rear legs come near stair walls then the bot is rested upon the upper stair the rear legs are then brought upwards and folded inwards thus achieving a perfect stair climb.
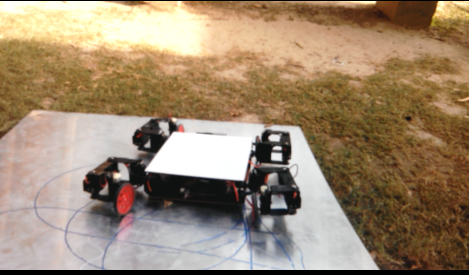
While encountering a rough surface the robot lowers itself by initial mechanisms a command is now given which transforms it into crawling mode in this mode the bot is in its lowermost position and the wheels face upwards.The legs are now moved forward in an inclined fashion and grips the ground. The thrust to move forward is provided by the legs which forces against the ground, leaping the bot forward.
The robot is currently operational in a semi-autonomous state future plans include the installation of sensors so as to detect the type of terrain and obstacles encountered and seeking out efficient ways to perform the tasks in completely autonomous state.
This project has won the best implementation award in research convocation’14.

With the consent of DRDO (Defence Research & Development Organisation) and further modifications from there side might increase its chance of being inducted into defence forces. It might be used to explore unknown territories and might also be useful in rescue operations.
REFERENCES:
https://www.youtube.com/watch?v=6tD3dsDzbeg
VIDEO LINKS:
INVENTOR DESIGN( .iam FILE) :
https://www.dropbox.com/s/3v580r68kpem9sa/fINAL%20dESIGN.iam?dl=0
This project has also made its appearance in a national newspaper.
 © Nerd Magazine, IIT Kanpur,2017. All rights reserved.
© Nerd Magazine, IIT Kanpur,2017. All rights reserved.
Comments
comments powered by Disqus