|
Visual Control Set Up |
||||
|
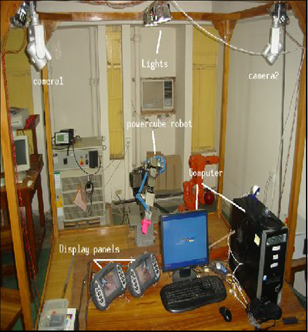
This experimental setup consists of a seven degrees of freedom manipulator from Schunk, Germany and a six degrees of freedom manipulator from ABB and stereo vision system. Experiments in visual control, trajectory tracking, real-time optimal redundancy resolution and cooperative, manipulation are being performed. This experimental setup is unique in the national scenario. This facility has been created through FIST, DST and MHRD sponsored projects. One Patrolbot and Two Pioneers from Active Media Robotics These facilities are being used for experiments in visual navigation, visual tracking of rigid and non-rigid objects, multi-robot system control and coordination. These facilities have been developed through FIST and DRDO sponsored projects |
||||
|
Location: |
||||
|
Intelligent Systems Laboratory, Department of Electrical Engineering, |
||||
|
Contact: |
||||
|
Prof.Laxmidhar Behera
|
||||
|
|
||||
|
|
||||
|
|
||||